嚥下ロボット
Development of Human – size Swallowing Robot
人間と等倍の
嚥下ロボットの開発
Development of Human –
size Swallowing Robot
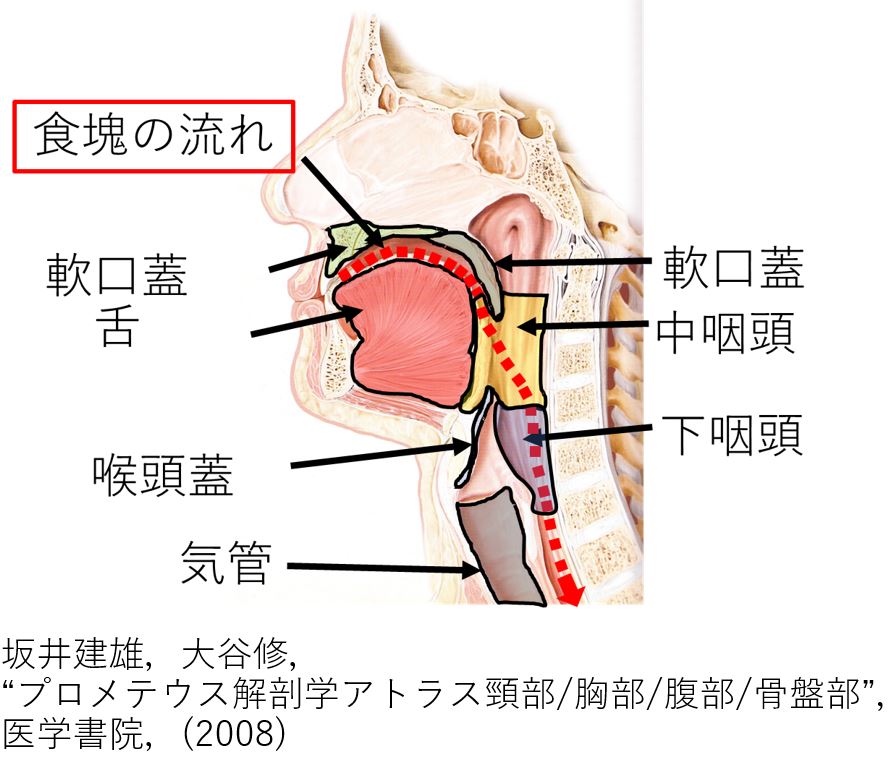
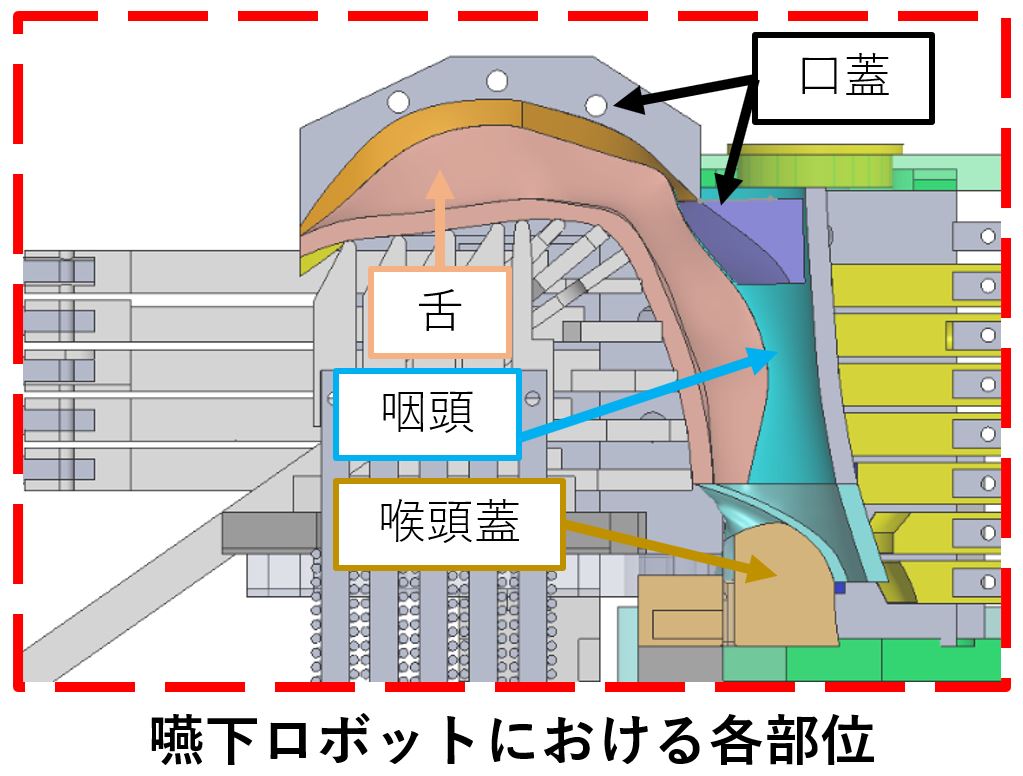
未だに詳細が不明な飲み込み(嚥下)動作,
その全容解明に向け,人間と同様の嚥下動作を行う
ロボットを開発しています.
この開発は医療画像,医療知識,
立体嚥下シミュレータ“Swallow Vision”
を参考に行っています.
Koba Lab.

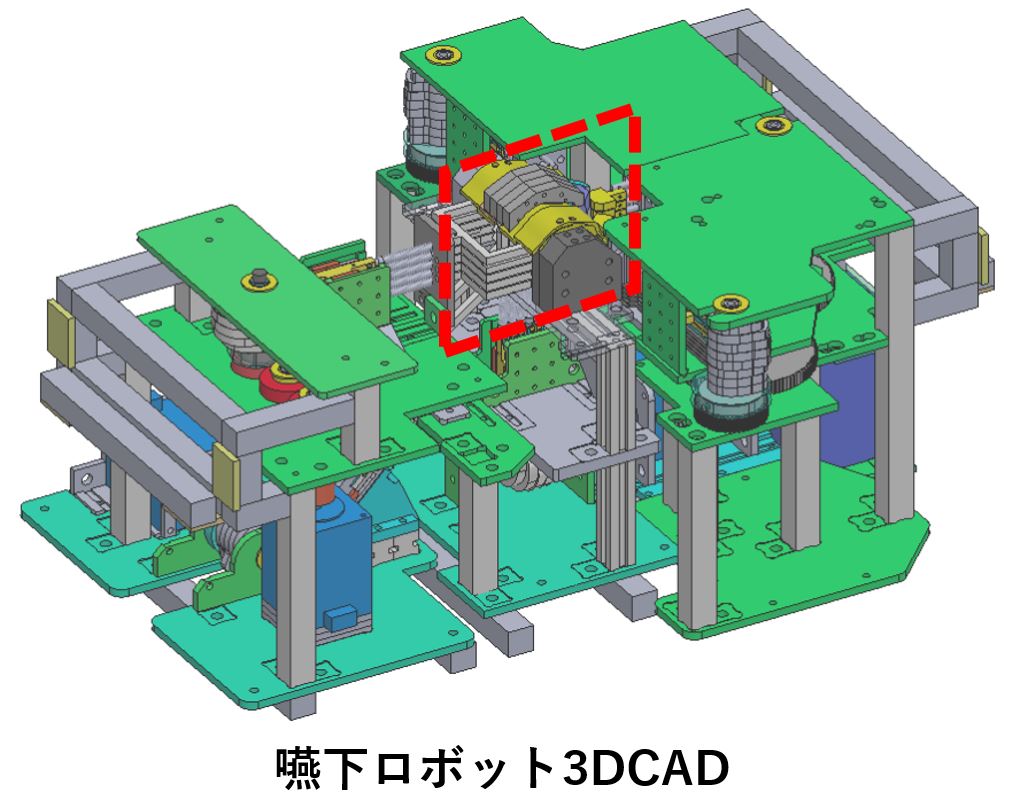
嚥下動作の再現
これまではMRIなどの医療画像の解析のみでロボットの動作・形状の決定をしていたため不明瞭な箇所がありました.
これらに加え立体嚥下シミュレータ“Swallow Vision”による3Dモデルシミュレーションも参考にすることで,より人間に近い嚥下動作を再現するロボットを開発しています.
Works
佐藤央基,小林宏,松本賢太,“人間と等倍の嚥下ロボットの開発”, Proceedings of the 2022 JSME Conference on Robotics and Mechatronics
研究紹介
東京理科大学小林研究室では今を生きる私たちのそして未来の人々へに向かって
明日なき研究開発を行い商品として実用化しています。
Koba Lab.